






Hello! I'm Akash
I'm a Robotics Researcher and enthusiast. Currently, I am a Robotics Engineer and Scientist at A*star, Singapore. I am very passionate about building Robots, their controls, navigation and related mechanisms. I like to develop novel robots, write their controls and hope to make the development of Hardware easier and feasible for military and industrial purposes.

EXPERIENCE
2022-Present
Robtoics Engineer and Scientist
2018-2021
PhD Student, Research Assistant
Aug 2016-2018
Research Assistant
May2015-Aug2015
Research Scholar,RI,CMU.
Dec2014-Jan2015
Research Intern,Systemantics India PVT LTD.
May2014-July2014
Research Intern,IIT Bombay
Simtech, A*star
Variable flux motor design for robotics and EV applications. Jigs and fixture design for motor testing.
ADVR, IIT Genova
Research on the actuator Development with the aim of efficient and compact planetary gear box..
IIIT,Hyderabad
Worked on the design and implementation of Crawler mechanisms.Work included development of Pipe Climbing robots,Quadraped and hybrid robots.
Robotics Institute,Carnegie Mellon university
Formulated the Mathematical model for the locomotion of the snake robot in viscous environment.
Designed of a compact Ark motion controller circuit board (AM 2.0, thecircuit of the torque controlled motors) for the Industrial Arms
Sine Lab,IIT BOMBAY
All the basic robot gaits were applied on the snake robot (includinga new gait mamba motion).Tree climbing was tried with robot.To make the snake robot user friendly we built a GUI so that
respective angles/gaits can be directly given by a user easily
EDUCATION
Nov 2018-Jun 2022
PhD in Robotics and Actuation Design
IIT Genova
Member of Humanoids and human mechatronics lab in IIT.
Working on Robot and mechatronics design. Actuator Design and thermal control.
Apr 2012-2016
Bachelor's Degree
NIT Nagpur
I did my under graduation in Electronics and Communications Engineering.I did my major from Robotics.
2000-Mar 2012
High School Diploma
Air Force school
Studied among the top most schools in the country and stood among top 3 in the class regularly.Also participated in many cocurricular activities like sports,cricket and football.
SKILLS

Cad Design-Solidworks,Katia
Circuit Design-Eagle,Proteas
Manufacturing and Fabrication:CNC,MIlling,3d Printing
Programming:C,C++,Matlab
Embedded: Arm Cortex(32bit),AVR Series.
Motion/Dynamics analysis: ADAMS, Simulink, VREP
Publications
Design of a Quasi-Direct-Drive Actuator for Dynamic Motions(MDPI,Actuators)
In this work, we present a quasi-direct drive actuator designed for continuous high-speed motions in high torque such as wheeled motions in mobile robot or joint motion in dynamic legged robots. The presented actuator exploits low reduction gearing so that it can render over 26 Nm continuous torque while the actuator speed can exceed 37 rad/s.A single-level planetary gearbox is devised for the reduction unit to ensure highly back drivability and transparency of the actuator thereby making the actuator robust against external impacts and allowing for accurate torque control using motor current measurement.
Cobraso (link):
RSS 2018,Legged Robots Design WS,CMU
A novel design of an Omnidirectional bendable Omnicrawler module. Compared to conventional crawlers, OmniCrawler module possesses an extra degree of freedom for sideways rolling motion, and the circular crosssection of the module enables holonomic motion of the robot. These advantages are further enhanced by the introduction of Omnidirectional joint with-in the module, which is the key contribution of this paper.
Cocrip(link)
IROS 2017,Vancouver
A modular in-pipeline climbing robot with a novel compliant foldable OmniCrawler mechanism. The circular cross-section of the OmniCrawler module enables a holonomic motion to facilitate the alignment of the robot in the direction of bends. Additionally, the crawler mechanism provides a fair amount of traction, even on slippery surfaces. These advantages of crawler modules have been further supplemented by incorporating active compliance in the module itself which helps to negotiate sharp bends in small diameter pipes.
Design and optimal springs stiffness estimation of a Modular OmniCrawler in-pipe climbing Robot (link)
ROBIO 2017,Macau
This paper discusses the design of a novel compliant in-pipe climbing modular robot for small diameter pipes. The robot consists of a kinematic chain of 3 OmniCrawler modules with a link connected in between 2 adjacent modules via compliant joints. While the tank-like crawler mechanism provides good traction on low friction surfaces, its circular cross-section makes it holonomic.
Modelling and Path Planning of Snake Robot in cluttered environment (link)
IEEE/IFToMM REMAR,TU Delft 2018
Studying snake robot locomotion in a cluttered environment has been a complicated task because the motion model is discontinuous due to the physical contact with obstacles, and the contact force cannot be determined solely by contact positions. We present a unique mathematical model of the robot interacting with obstacles in which the contact forces are mapped on the basis of a viscous friction model.
OSMOS(link)
IEEE-ICM 2017,Australia
Control, motion estimation, and planning of highly articulated snake robots have been challenging tasks for researchers. Even traversal on simple flat trajectory requires complex models of planar snake robot locomotion. This paper presents a novel design of an Omni-directional planar snake robot (OSMOS) consisting of mechanically and software linked spherical robot modules.
Extended Work accepted in IEEE REMAR 2018,TU Delft,Netherlands.
Motion analysis of Compliant Omni-
directional Spherical Modular Snake Robot
(COSMOS)(link)
REMAR, TU Delft 2018
State estimation and motion planning of highly articulated snake robots have been challenging tasks for researchers. This paper presents a novel design of a Compliant Omni-directional snake robot (COSMOS) consisting of mechanically and software linked spherical robot modules. This design eliminates the problems of planar snake robots to handle versatile motions with complex gait analysis, by leveraging Omni-directional motion capabilities of spherical robots.
A novel design of a multi section continuum robot with ability of varying section Sizes (link)
IROS 2017
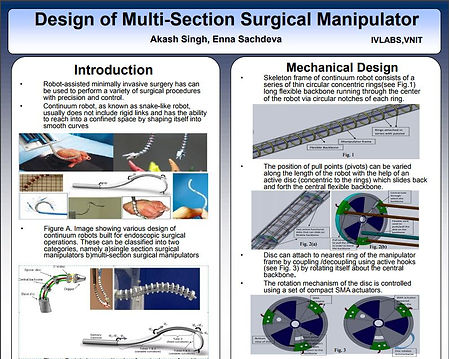
Robot-assisted minimally invasive surgery has can be used to perform a variety of surgical procedures with precision and control. However controlling the shape and
curvature of the robot for a variable purpose endoscopic surgery is always a challenge. We present a novel design of a multi-section surgical continuum manipulator which is can be used to
achieve variable bends depending upon the motion requirements and workspace of the surgery.
Motion analysis of Compliant Omni-
directional Spherical Modular Snake Robot
(COSMOS)(link)
REMAR, TU Delft 2018
State estimation and motion planning of highly articulated snake robots have been challenging tasks for researchers. This paper presents a novel design of a Compliant Omni-directional snake robot (COSMOS) consisting of mechanically and software linked spherical robot modules. This design eliminates the problems of planar snake robots to handle versatile motions with complex gait analysis, by leveraging Omni-directional motion capabilities of spherical robots.
Patents
Omnidirectional Bendable Omni crawler Module, Patent (USA).
Telescopic differential Screw based Stewart Platform, Patent (USA).
Hybrid Robot, Patent(India) application number 201721020615
Projects
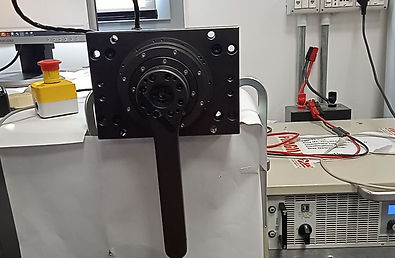
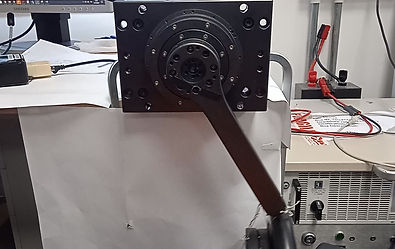
Testing of motors and Design of Variable Size Jigs and Fixtures
-
Designed and developed Variable fixtures to accommodate and test a large range of motors with dynamometers and external torque test motors.

Design and development of PMSM motors, Characterisation of Hybrid torque-speed actuators.
-
Design and development of PMSM motors, High-performance motors designed for Electric Vehicles, achieving high flux and torque values.
-
Dual-rotor motors for a hybrid robot’s wheel and legged joints. Developed Jigs, Fixtures, and Testing stands for high-torque (400 Nm) motors to drive wheels of E2W vehicles.
-
A hybrid electromagnetic actuator product with a dual rotor configuration. Also developed variable reluctance PMSM motor targeting high efficiency for Electric vehicles increasing efficiency up to 96%.

Design and motion planning 4 wheel-legged hybrid robot.
-
Robot Design: Light leg design needs the wheel actuators to be assembled inside the chassis. All the joint and wheel actuation is the same.
-
Motion planning and localisation of the robot performed in ROS 2 Navigation Stack and motion simulation of UGV in adams.
-
Pioneered thermal modelling, achieved state estimation with up to 90% accuracy, and mastered current
control for the robotic actuator's explosive 600m/s-square action.



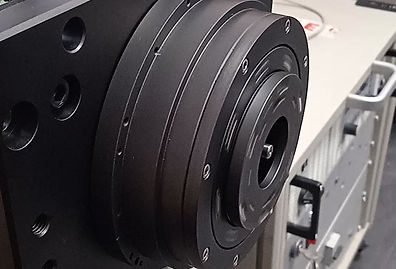
Design and development of Quasi Direct Drive Actuators, Variable Stiffness Actuators.
-
Design and Development of Quasi-Direct drive high torque, high speed Pancake shaped actuators, Variable stiffness actuators.
-
Carefully designed gears and actuator assembly, smaller dimensions, higher accuracy in control due to force transparency.
-
Peak Torque upto 50 Nm, Peak speed upto 37.1 rad/s.

Forced cooling effect on Thermal control and output torque behaviour, Variable Stiffness.
-
Thermal model identification of the actuator to control peak input current at a given temperature was done.
-
Impedance Controller with friction compensation on actuator output coupled with thermal current limits was successfully tested.


Design, Walking gait analysis and navigation of tracked robot COBRASO
-
A novel design if an omnideirectional bendable Omni Crawler module is proposed.
-
AMCL (Adaptive Monte Carlo Localization) for real-time localization and autonomous navigation of 20-DOF 4-legged robots with a shared locomotion module.




My Channel
Quasi static motion analysis and design of Tracked modular vehicle COCRIP
-
Development of snake robot consisting of mechanically connected multiple spherical bots: Robot able to handle lateral motions and complex gait analysis by leveraging the motion capabilities of spherical bots.
-
Spherical robots are interconnected using a novel link designed similar to a spherical joint link consisting of a pair of conical rings joined together.
-
Applied Optimal controls and motion planning for pipe climbing and robots proficient at executing sharp
90 turns and flexible-legged robots.

Design and control of Autonomous Drones
-
Ardupilot Control: Proficient in ArduPilot configuration and tuning for precise drone control, ensuring stable and responsive flight performance.
-
Flying Navigation: Designed and implemented advanced autonomous flight navigation, enabling the drone to execute complex missions, follow waypoints accurately, and conduct area surveys with precision to UGVs and shift disposals.


Motion planning and controls of of Novel Compliant omnicrawler-wheel transforming module
-
A Novel design of a crawler robot which is capable of transforming its chassis from Omni crawler model to alarge sized wheel using a novel transform mechanism.
-
Simulated locomotion gaits and the 4-leg crawler module robot's interactions with the environment in
Gazebo. Harnessed ROS2-ADAMS for motion simulation with an outstanding 90% repeatability rate.

OSMOS(Omni Directional Spherical Snake robot)
-
Development of snake robot consisting mechanically connected multiple spherical bots: Robot able to handle lateral motions and complex gait
analysis by leveraging motion capabilities of spherical bots.
-
Spherical robots interconnected using a novel link designed similar to a spherical joint link consisting of a pair of conical rings joined together.
-
Applied Optimal controls and motion planning for pipe climbing and ro- bots proficient at executing sharp 90 turns and flexible-legged robots

Modelling and Path Planning of Snake robot through Cluttered Environment
The four figures show the obstacle aided motion of the CMU snake robot in a viscous material to reach the goal point in a cluttered environment.
-
Formulated the Mathematical model for the locomotion of the snake robot in the viscous environment.
-
Designed a Simulator in Matlab for testing the Mathematical Model and estimation of motion of the snake robot keeping the simulation model similar to the real environment.
-
Used Depth first search, Breadth first search and Dijkstra’s algorithm to find the best possible path for the snake robot to reach the Goal point indicated in the four images.

Design of Walking Gait, Fabrication and Control of a 20 DOF Humanoid
With the aim of making a robot which would be able to interact the best with humans along with performing needed tasks in the best way.
-
The control of the robot was done using ROS Groovy on Ubuntu 12.04.
-
The ZMP based walking gait for the humanoid robot was successfully implemented by me.
-
I also designed the sub-controller circuit for the robot based upon the ARM-Cortex M4 Processor and created a software
interface for the actuators, sensors and camera collaboration.

Gait design and locomotion analysis of Snake Robot
-
A completely ROS (Robot Operating System) controlled robot.
-
The parts were made using Derlin material. Parts were fabricated using CNC and a milling machine.
-
Tree climbing was tried on the robot by reducing the individual weights of the links.
-
All the basic snake motion gaits were applied successfully.
-
GUI for snake control: To make our robot user-friendly we built a GUI (Graphic user interface).Using this GUI user can directly run gait of his choice.

UAV and Butler Bot(2013-2014)
Funded by Texas Instruments for Texas Instruments Innovation Challenge 2014, India. (Selected for 2nd round, awaiting result)
-
A self-contained UAV system consisting of Beagle Bone Black , Pico Projector , Tiva C-series launch pad , LiPo battery .
-
Navigation of the Butler robot (UGV) is made with the help of android application device using the values accelerometer as per the orientation and tilt with respect to the ground.
-
A power screw mechanism is used to change the height of the top for the convenience of the user.

Design of a novel conceptual surgical snake robot in NUS
-
A conceptual novel design of multi section continuum manipulator with applications in endoscopic surgery is presented
-
The conceptual robot is capable of changing section sizes using a disc that can move back and forth through the center of the flexible backbone.
-
The conceptual multi-section robot is capable of changing section sizes

UGV, Sensor Fusion of EV and Braille E-Reader at IIIT Hyderabad
-
Involved in the sensor integration of all the important sensors in EV for the targetted EV application in IIIT Hyderabad
-
Mentored a team of four people Involved in development of a low cost electronic braille reader for the blind by integrating function, ergonomics and aesthetics while keeping product cost low.
-
The system involves reading data from an android app and transmitting this data to a hand held compact device that shows up the corresponding braille code on to the finger tip of the user.
-
Involves a disc mounted on servo motor which rotates to display embedded characters on the display window accordingly.


SMA Actuated Dual Arm flexible Gripper
Along with a team of four people developed a low-cost novel gripper capable of holding objects of wide range diameter and shapes.
-
The gripper is capable of gripping variable curvature using a relatively flexible belt whose bending actuation is achieved by SMA actuator.
-
The gripping stiction on any surface is highest possible as the whole gripping surface(of the belt) adapts to the shape of the object and hence achieves high gripping force.



Fabrication and navigation of Rebis:
-
Fabrication of ReBiS (Reconfigurable Bipedal Snake), a novel transforming snake for navigating in closed spaces. Presented by Thakker et al in IROS 2014. (Watch here).Later on the basic snake gaits were also applied by me.
-
Visual perception for localization for articulated robots in unpredictable environment.

Designed a joint controller and system controller in a winter internship project at Systemantics India Pvt. Ltd in 2014.
-
Designed of a compact Ark motion controller circuit board (AM 2.0, the
circuit of the torque controlled motors) for the Industrial Arms to be released
in market by the fall of 2015.
Implementation of “smart emotion sensing device”:
Under Texas Instruments Analog Design 2015, India.
-
Developing an emotion recognition system based on information provided by the physiological signals. These signals are obtained from a skin temperature sensor, a heart rate sensor, and a skin conductance sensor.
Made a Virtual Drawing Pad using image processing:
-
Image Processing: Graphical User Interphase (GUI) is developed to identify colored object in frame of view using image processing. Open CV was used for Image Acquisition and analysis. The program tracks the marker’s movement and draws the centroid of the area identified as a marker onto the display screen.

AutonomousGridFollower(2013)
-
Made an autonomous grid follower robot to take part in AUTOMATION &ROBOTICS event in VNIT-Nagpur Techfest.
Blob Follower(2013)
-
Made an autonomous cube follower and catcher for Techfest 2014 held at IIT Bombay. This bot was made using an image processing algorithm in Open CV.

-
Designed a joint controller and system controller in a winter internship project at Systemantics India Pvt. Ltd in 2014.
-
Made a Remote controll mini ed plane from scratch with a team of 3 members.
-
Designed miniature a hovercraft for participation in hovercraft competition in Techiest, IIT Bombay 2013.
-
Participated in Aqua Doze(swimming robot) robot competion, a Manual Robotics event organized in AXIS 2013. Selected for final round.